

Lane detection and segmentation have a lot of use cases, especially in self-driving vehicles. With lane detection and segmentation, the vehicle gets to see different types of lanes. This allows it to accordingly plan the route and action. Of course, there are several other components involved along with computer vision and deep learning. But this serves as the first step. In this article, we will try to solve the first step involving computer vision and deep learning. We will train a Mask RCNN model for lane detection and segmentation. We are taking an instance segmentation approach to detect and segment various types of lane lines.
Solving lane detection and segmentation can be a challenging task, even with a powerful model like Mask RCNN. This is because almost every image or frame involves very thin objects (lane lines) which are also far away. But we will try our best to optimize the model as much as possible and get the best results for lane detection using instance segmentation.
Before we move any further, let’s take a look at the points that we will cover in this post:
- We will start with a discussion of the lane detection and segmentation dataset.
- Next, we will talk about the Mask RCNN instance segmentation model and why we choose it.
- Moving forward, we will discuss the training scripts and code files.
- After training the model, we will analyze the results and run inference on images and videos.
- We will finish the article with a discussion of how to improve the project even further.
The Lane Detection and Segmentation Dataset
The lane detection dataset that we will train the Mask RCNN model on is originally available on Roboflow. But we will use a slightly modified version that I have prepared. You can find the road lane instance segmentation dataset on Kaggle.
The dataset contains 1021 training samples and 112 test samples.
There are 6 object classes in total. They are:
- divider-line
- dotted-line
- double-line
- random-line
- road-sign-line
- solid-line
You can go ahead, download, and extract the dataset locally. After extracting the dataset, you will find the following structure:
road_lane_instance_segmentation ├── annotations │ ├── instances_train2017.json │ └── instances_val2017.json ├── train2017 [1021 entries exceeds filelimit, not opening dir] ├── val2017 [112 entries exceeds filelimit, not opening dir] ├── README.dataset.txt └── README.roboflow.txt
The modified version on Kaggle has JSON annotation format just like the COCO object detection dataset. The training and validation folders are named train2017 and val2017 respectively. Similarly, the annotations folder contains instances_train2017.json and instances_val2017.json. Other than that, there are a few text files from the original Roboflow dataset.
Visualizing Dataset Samples
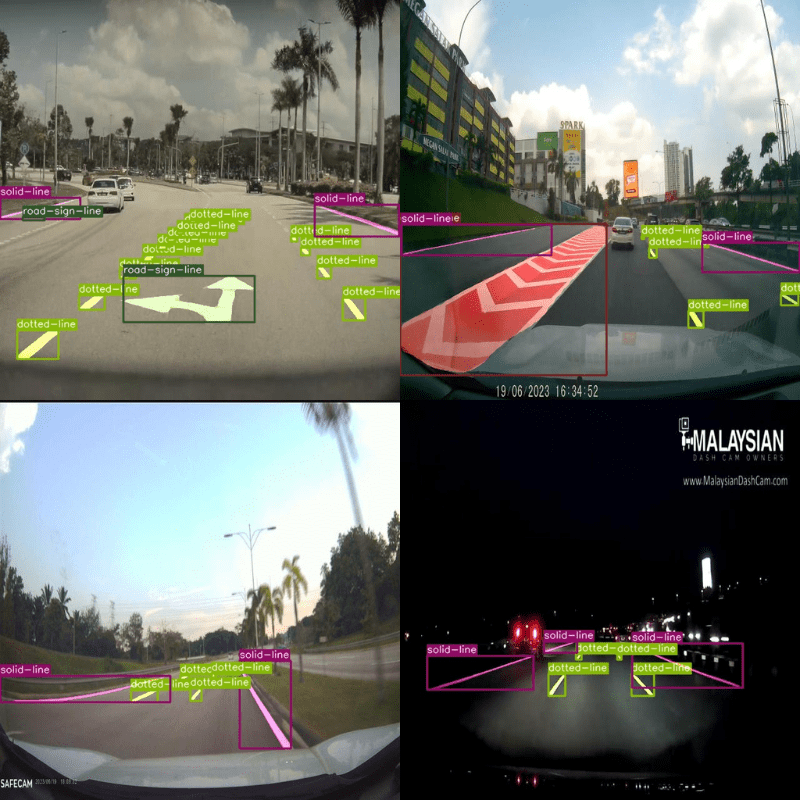
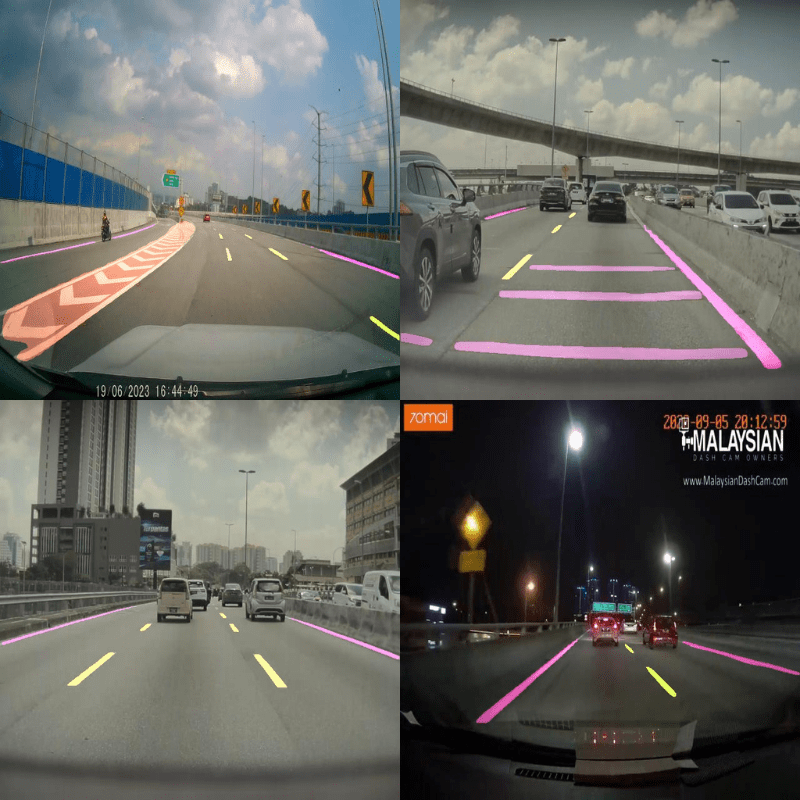
Let’s take a look at a few samples from the dataset.

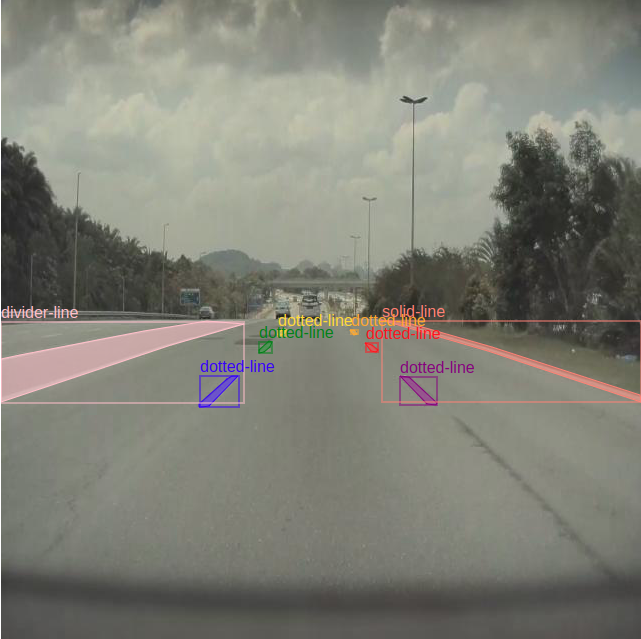

The above figures show a few samples with the annotations from the dataset. We can see almost all the images are driving dashcam videos taken from real footage. So, the model will always get to see real-world data while training.
However, it is very important to note that some of the classes in the dataset are heavily underrepresented. These include categories like double-line and road-sign-line. So, the model may not get trained optimally for each class.
We will end the discussion of the dataset here. Feel free to explore it a bit on your own before moving forward.
The Project Directory Structure
Here is the complete project directory structure.
├── input │ ├── inference_data │ └── road_lane_instance_segmentation ├── metrics │ ├── coco_eval.py │ ├── coco_utils.py │ └── utils.py ├── notebooks │ └── visualize.ipynb ├── outputs │ ├── inference │ └── training ├── class_names.py ├── custom_utils.py ├── engine.py ├── group_by_aspect_ratio.py ├── inference_image.py ├── inference_video.py ├── infer_utils.py ├── presets.py ├── train.py └── transforms.py
- The
road_lane_instance_segmentationdataset directory resides inside theinputdirectory. It also contains aninference_datadirectory with a few videos from the internet on which we will carry out inference. - The
notebooksdirectory contains a notebook to visualize the ground truth data. - Inside the
outputsdirectory, we have all the training and inference outputs within their respective subdirectories. - We have a lot of Python files directly inside the parent project directory. These include the training and inference scripts among others. Also, the
metricsdirectory contains the code for the evaluation using pycocotools.
All the code files, trained weights, and inference data will be available via the download section in this article. If you wish to carry out training, please download the dataset from Kaggle and arrange it in the above structure.
PyTorch Version and Other Dependencies
The codebase for this article uses PyTorch 2.0.1 on Ubuntu 20.04. I recommend using at least PyToch 2.0.0 to get the best performance.
Also, we will use pycocotools for evaluation. If you are on any of the supported Linux OS, you can install it using the following command.
pip install pycocotools
There are other requirements for visualizations and inference which you can install as you move along.
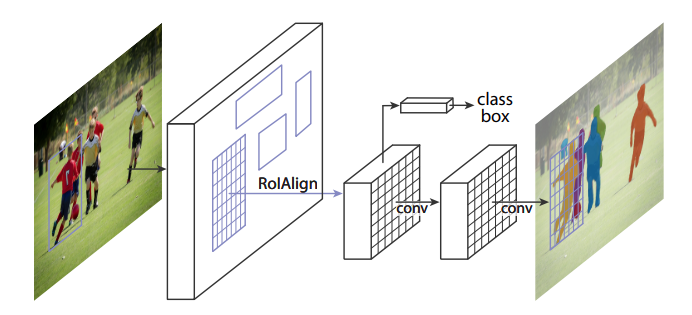
The Mask RCNN Model for Instance Segmentation
The Mask RCNN instance segmentation model is still one of the best models out there till now for instance segmentation.
With the release of Mask RCNN ResNet50 FPN V2 we have even better pretrained weights. The new model provides mask mAP of 41.8% and box mAP of 47.4%. Further, this model has been trained with a new recipe which makes it even more robust when fine-tuning Mask RCNN on a new dataset. The new recipe includes post-paper optimizations which improve the mAP by 9.5% for boxes and 7.2% for masks.
However, one downside of the newer model is that it uses heavier RPN, box, and mask heads. This makes the model slower compared to its previous version. For the time being, we will still move forward with the better and slower version and check its performance while training.
That said, we will still observe the inference speed (FPS) on videos at the end.
All training and inference experiments were carried out on a machine with 10 GB RTX 3080 GPU, 10th generation i7 CPU, and 32 GB of RAM.
Download Code
Lane Detection and Segmentation using PyTorch Mask RCNN
The codebase for this article is quite large. So, we will not discuss all the code files. Rather, we will take a very practical approach and discuss what methods we use to train the best Mask RCNN model that we can.
We will be adapting code from the Torchvision repository and modifying it according to our needs.
Dataset Preparation and Data Augmentation
Dataset preparation and data augmentation are some of the most important steps for any deep learning project. Although most of the dataset preparation steps are handled by the scripts that we will use, we still have a good amount of control over the data augmentation that we want to apply.
From experiments, I found that applying some advanced augmentations allows us to train for longer without overfitting and also reach higher metrics for object detection and segmentation as well.
The transforms.py file contains a lot of augmentation techniques. Among these, we have two powerful data augmentation techniques for object detection and instance segmentation. They are:
- LSJ (Large Scale Jittering)
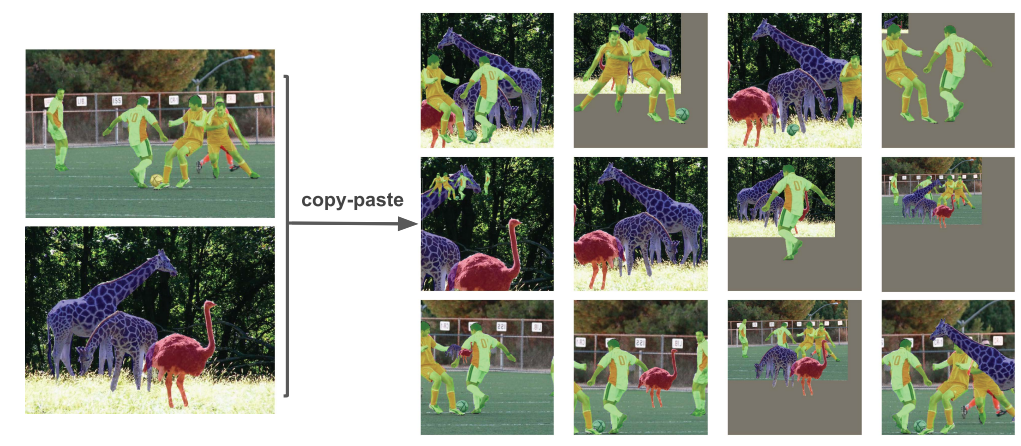
- Simple Copy-Paste
The above augmentations were introduced in the paper Simple Copy-Paste is a Strong Data Augmentation Method for Instance Segmentation.
LSJ resizes the images from a range of 0.1 to 2.0 scale which allows the model to learn features of both small and large objects.
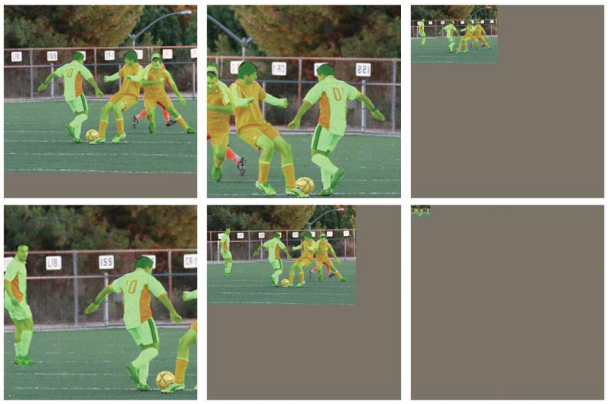
Simple Copy-Paste copies and pastes objects (instances) from one image into another. This allows the model to see diverse images which it may not encounter directly from the dataset distribution.
As we can see, applying the above augmentations will surely help us train a much more robust model. Moving forward, we will see how to apply these augmentations when executing the training script.
Other Helpful Scripts
Before moving to the training script, here are some other Python files that you may want to take a look at.
engine.py: This file contains the training and validation functions. The validation function calls pycocotools for evaluation to provide the mAP (Mean Average Precision) for object detection and segmentation.presets.py: This file includes all the dataset augmentations presets that we can apply during training. We will be applying thelsjdataset augmentation technique.custom_utils.py: It contains a simple function to plot the mAP graphs after each epoch.
Note: A lot of files from the original Torchvision repository have been slightly modified to make our work easier along the way. As we move along with future posts, the scripts may be updated and provided along with that post through the download section.
The Training Script
The train.py file is the executable script that we will run from the command line. It has a lot of command line arguments. But we will focus only on those that we will use while executing the script.
The training script saves a separate model weight file after each epoch and the checkpoint of every epoch by the name of checkpoint.pth.
Let’s start the training and see how Mask RCNN performs on the lane detection dataset. We can execute the following command from the project’s root directory to start the training.
python train.py \ --data-path input/road_lane_instance_segmentation \ --model maskrcnn_resnet50_fpn_v2 \ --weights MaskRCNN_ResNet50_FPN_V2_Weights.COCO_V1 \ --batch-size 4 \ --epochs 20 \ --lr 0.005 \ --output-dir outputs/training/road_line \ --amp \ --lr-steps 10 \ --data-augmentation lsj \ --use-copypaste
Following are the details of the command line arguments that we use in the above command:
--data-path: This accepts the directory path where the dataset is present in the COCO format.--model: The model that we want to use. Here, we are using the Mask RCNN ResNet50 FPN V2 model.--weights: The weights enum. To match the above model, we are providing the appropriate weight file name.--batch-size: This is the batch size that we want to use for the data loaders. Here, it is 4. It uses around 8.5 GB of VRAM. Please reduce the batch size in case you face OOM (Out Of Memory) error.--epochs: The number of epochs to train for. We are training for 20 epochs.--lr: The base learning rate after the initial warm-up.--output-dir: This is the directory name where all the model checkpoints and mAP graphs will be saved. It will be created automatically if not present.--amp: A boolean argument indicating that we want to use Automatic Mixed Precision.--lr-steps: Number of epochs after which to apply the step learning rate scheduler.--data-augmentation: As we discussed earlier, we are applying thelsjdata augmentation here.--use-copypaste: A boolean argument indicating that we want to use the Simple Copy-Paste augmentation.
Note: We can use the Simple Copy-Paste augmentation only if --data-augmentation is lsj.
Analyzing the Results
These are the results from the command line from the last few epochs.
. . . Epoch: [15] Total time: 0:01:31 (0.3610 s / it) Test: [ 0/112] eta: 0:00:22 model_time: 0.0498 (0.0498) evaluator_time: 0.0106 (0.0106) time: 0.1983 data: 0.1369 max mem: 5146 Test: [100/112] eta: 0:00:00 model_time: 0.0508 (0.0521) evaluator_time: 0.0177 (0.0211) time: 0.0744 data: 0.0018 max mem: 5146 Test: [111/112] eta: 0:00:00 model_time: 0.0450 (0.0521) evaluator_time: 0.0150 (0.0210) time: 0.0706 data: 0.0018 max mem: 5146 Test: Total time: 0:00:08 (0.0782 s / it) Averaged stats: model_time: 0.0450 (0.0521) evaluator_time: 0.0150 (0.0210) Accumulating evaluation results... DONE (t=0.05s). Accumulating evaluation results... DONE (t=0.04s). IoU metric: bbox Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.564 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.794 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.616 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.258 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.655 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.775 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.370 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.625 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.640 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.348 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.762 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.810 IoU metric: segm Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.397 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.752 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.405 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.133 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.510 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.613 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.279 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.464 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.477 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.230 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.622 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.626 . . . Epoch: [19] Total time: 0:01:32 (0.3627 s / it) Test: [ 0/112] eta: 0:00:22 model_time: 0.0504 (0.0504) evaluator_time: 0.0114 (0.0114) time: 0.2033 data: 0.1404 max mem: 5146 Test: [100/112] eta: 0:00:00 model_time: 0.0515 (0.0539) evaluator_time: 0.0166 (0.0216) time: 0.0781 data: 0.0018 max mem: 5146 Test: [111/112] eta: 0:00:00 model_time: 0.0456 (0.0539) evaluator_time: 0.0157 (0.0215) time: 0.0724 data: 0.0018 max mem: 5146 Test: Total time: 0:00:09 (0.0807 s / it) Averaged stats: model_time: 0.0456 (0.0539) evaluator_time: 0.0157 (0.0215) Accumulating evaluation results... DONE (t=0.05s). Accumulating evaluation results... DONE (t=0.06s). IoU metric: bbox Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.538 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.778 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.573 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.243 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.660 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.773 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.363 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.613 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.628 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.334 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.768 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.818 IoU metric: segm Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.386 Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.733 Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.394 Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.133 Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.498 Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.613 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.274 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.462 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.476 Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.230 Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.614 Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.627 Training time 0:36:01
The Mask RCNN model reaches the best box mAP and segmentation mAP of 56.4% and 39.7% respectively on epoch 16 (epoch number starts from 0).
Let’s take a look at the graphs to get an even better idea.
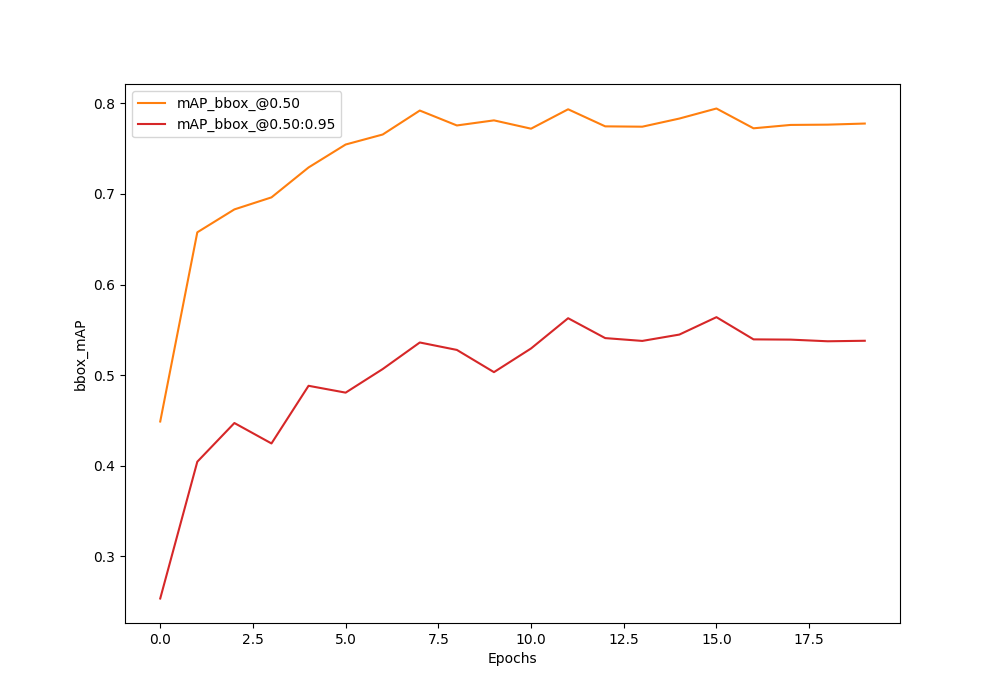
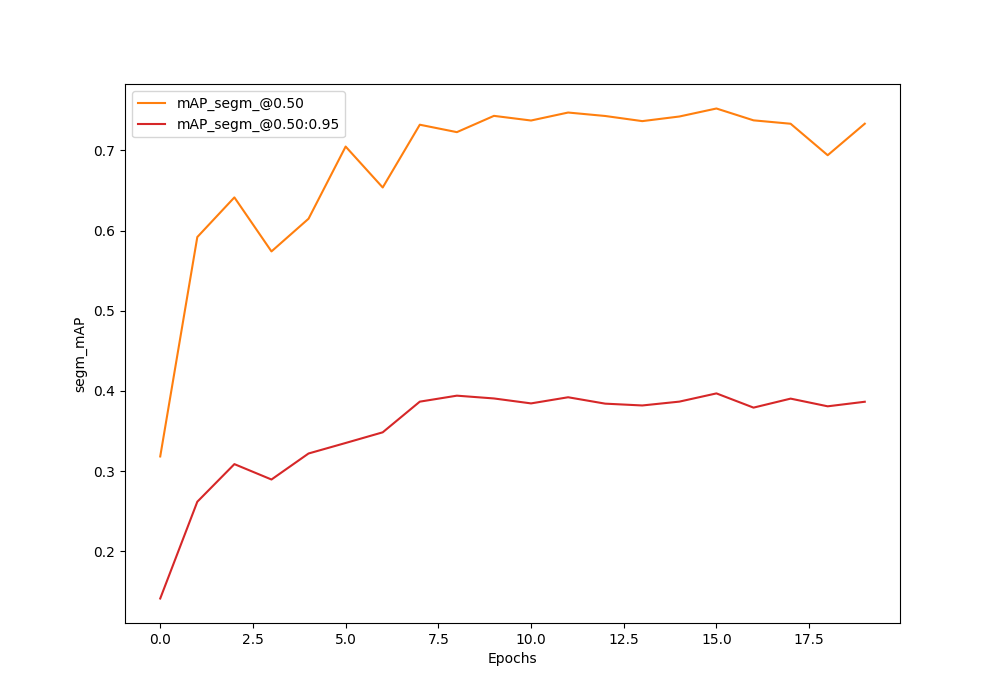
As we can see, the mAP was increasing for both till epoch 15. Most probably, if we apply another learning rate scheduler step after epoch 20, we can train even longer. For now, we will move forward with the best model weights from epoch 16.
Inference on Images using the Trained Mask RCNN Model
We have the Mask RCNN checkpoints trained on the lane detection and segmentation dataset. We can use the inference_image.py script to run inference on the validation images from the dataset and see how it performs.
Note: The inference scripts (image and video) by default load the Faster RCNN ResNet50 FPN V2 model as that’s what we used during training.
Executing the following command will carry out inference on the validation images.
python inference_image.py --weights outputs/training/road_line/model_15.pth --threshold 0.8 --input input/road_lane_instance_segmentation/val2017/ --show
Here are the command line arguments that we use:
--weights: Path to the weights file. We are using the weights from epoch 16 here.--threshold: We are using a confidence threshold of 0.8.--input: Path to the input directory containing the images.--show: This is a boolean argument indicating that we want to visualize all the images on the screen as the inference is going on.
All the results are stored in outputs/inference directory.
Here are some of the results.
The results are pretty good. It is detecting almost all the lines correctly even during the nighttime.
To get an even clearer picture, we can disable the bounding boxes using the --no-boxes argument.
python inference_image.py --weights outputs/training/road_line/model_15.pth --threshold 0.8 --input input/road_lane_instance_segmentation/val2017/ --show --no-boxes
This will plot just the segmentation maps. Here are some of the results.
We can see that the model is performing pretty well on the validation images.
But these images are from the same distribution as the training images. Let’s make it more challenging and run inference on some unseen videos.
Lane Detection Inference on Videos using the Trained Mask RCNN Model
We will carry out inference on two videos. For this, we will take the help of the inference_video.py script.
Let’s start with a video on which the model performs relatively well.
python inference_video.py --weights outputs/training/road_line/model_15.pth --show --threshold 0.9 --input input/inference_data/video_3.mp4 --no-boxes
Almost all the command line arguments remain the same apart from the input file which is now a video. Also, we are using a score threshold of 0.9.
The results look really good. The model is able to segment the solid lines and dotted lines in almost all the frames. It is able to run at an average of 17 FPS on the RTX 3080 GPU.
Next, let’s run inference on a video where the model performs relatively worse. We are just changing the video path here.
python inference_video.py --weights outputs/training/road_line/model_15.pth --show --threshold 0.9 --input input/inference_data/video_1.mp4 --no-boxes
Firstly, the model is not able to segment all the dotted lanes on the left. Secondly, it is detecting the dotted lanes on the right as solid lanes in some of the frames.
This shows the issues with out-of-distribution inference. We can improve the performance on such real-world videos by including such data in the training set. This will help us train a more robust lane detection Mask RCNN model.
Summary and Conclusion
In this article, we trained a Mask RCNN model for lane detection and segmentation. We approached the problem with an instance segmentation solution. The results were fairly good. However, we saw some limitations and discussed how we can improve upon them. I hope that this article was worth your time.
If you have any doubts, thoughts, or suggestions, please leave them in the comment section. I will surely address them.
You can contact me using the Contact section. You can also find me on LinkedIn, and X.
Other Articles on Lane Detection and Segmentation
References
- Torchvision GitHub references
- Simple Copy-Paste is a Strong Data Augmentation Method for Instance Segmentation
