
In this tutorial, we will learn about sparse autoencoder neural networks using KL divergence. We will also implement sparse autoencoder neural networks using KL divergence with the PyTorch deep learning library.
In the last tutorial, Sparse Autoencoders using L1 Regularization with PyTorch, we discussed sparse autoencoders using L1 regularization. We also learned how to code our way through everything using PyTorch.
This tutorial will teach you about another technique to add sparsity to autoencoder neural networks. Kullback-Leibler divergence, or more commonly known as KL-divergence can also be used to add sparsity constraint to autoencoders.
What Will We Cover in this Article?
- Sparsity in autoencoder.
- A brief on KL-divergence.
- How to use KL-divergence to implement sparsity in autoencoder neural networks?
- Coding a sparse autoencoder neural network using KL divergence sparsity with PyTorch.
We will go through all the above points in detail covering both, the theory and practical coding.
Before moving further, there is a really good lecture note by Andrew Ng on sparse autoencoders that you should surely check out. I will be using some ideas from that to explain the concepts in this article.
Sparsity in Autoencoders
In the previous articles, we have already established that autoencoder neural networks map the input \(x\) to \(\hat{x}\).
But bigger networks tend to just copy the input to the output after a few iterations. We want to avoid this so as to learn the interesting features of the data. We can do that by adding sparsity to the activations of the hidden neurons.
In neural networks, a neuron fires when its activation is close to 1 and does not fire when its activation is close to 0. So, adding sparsity will make the activations of many of the neurons close to 0.
What is KL Divergence?
KL divergence is a measure of the difference between two probability distributions. When two probability distributions are exactly similar, then the KL divergence between them is 0.
For example, let’s say that we have a true distribution \(P\) and an approximate distribution \(Q\). Then KL divergence will calculate the similarity (or dissimilarity) between the two probability distributions. The following is the formula:
$$
D_{KL}(P \| Q) = \sum_{x\epsilon\chi}P(x)\left[\log \frac{P(X)}{Q(X)}\right]
$$
where \(\chi\) is the probability space.
We need to keep in mind that although KL divergence tells us how one probability distribution is different from another, it is not a distance metric. That is, it does not calculate the distance between the probability distributions \(P\) and \(Q\).
All of this is all right, but how do we actually use KL divergence to add sparsity constraint to an autoencoder neural network? That’s what we will learn in the next section.
We will not go into the details of the mathematics of KL divergence. Instead, let’s learn how to use it in autoencoder neural networks for adding sparsity constraints.
Sparsity and KL Divergence
We already know that an activation close to 1 will result in the firing of a neuron and close to 0 will result in not firing.
Now, suppose that \(a_{j}\) is the activation of the hidden unit \(j\) in a neural network. When we give it an input \(x\), then the activation will become \(a_{j}(x)\). This is the case for only one input.
Let the number of inputs be \(m\). So, \(x\) = \(x^{(1)}, …, x^{(m)}\). Then we have the average of the activations of the \(j^{th}\) neuron as
$$
\hat\rho_{j} = \frac{1}{m}\sum_{i=1}^{m}[a_{j}(x^{(i)})]
$$
There is another parameter called the sparsity parameter, \(\rho\). This value is mostly kept close to 0. And we would like \(\hat\rho_{j}\) and \(\rho\) to be as close as possible. In other words, we would like the activations to be close to 0. That will prevent the neurons from firing.
Sparsity Penalty Along with Regular Cost Function
In neural networks, we always have a cost function or criterion. For autoencoders, it is generally MSELoss to calculate the mean square error between the actual and predicted pixel values.
We will add another sparsity penalty in terms of \(\hat\rho_{j}\) and \(\rho\) to this MSELoss. The penalty will be applied on \(\hat\rho_{j}\) when it will deviate too much from \(\rho\). The following is the formula for the sparsity penalty.
$$
\sum_{j=1}^{s} = \rho\ log\frac{\rho}{\hat\rho_{j}}+(1-\rho)\ log\frac{1-\rho}{1-\hat\rho_{j}}
$$
where \(s\) is the number of neurons in the hidden layer.
In terms of KL divergence, we can write the above formula as \(\sum_{j=1}^{s}KL(\rho||\hat\rho_{j})\). Here, \( KL(\rho||\hat\rho_{j})\) = \(\rho\ log\frac{\rho}{\hat\rho_{j}}+(1-\rho)\ log\frac{1-\rho}{1-\hat\rho_{j}}\).
After finding the KL divergence, we need to add it to the original cost function that we are using (i.e. the MSELoss). Let’s call that cost function \(J(W, b)\). So, the final cost will become
$$
J_{sparse}(W, b) = J(W, b) + \beta\ \sum_{j=1}^{s}KL(\rho||\hat\rho_{j})
$$
where \(\beta\) controls the weight of the sparsity penalty.
You will find all of these in more detail in these notes. Do give it a look if you are interested in the mathematics behind it.
Looks like this much of theory should be enough and we can start with the coding part.
Implementing a Sparse Autoencoder using KL Divergence with PyTorch
Beginning from this section, we will focus on the coding part of this tutorial and implement our through sparse autoencoder using PyTorch.
The Dataset and the Directory Structure
Like the last article, we will be using the FashionMNIST dataset in this article. Starting with a too complicated dataset can make things difficult to understand.
For the directory structure, we will be using the following one.
├───input
├───outputs
│ └───images
└───src
sparse_ae_kl.py
inputwill contain the Fashion MNIST dataset that we will download using the PyTorchdatasetsmodule.outputswill contain the model that we will train and save along with the loss plots. Theimagessubdirectory will contain the images that the autoencoder neural network will reconstruct.srcfolder contains a python file namedsparse_ar_kl.py. All of our code will go into this python file.
Importing the Required Modules
In this section, we will import all the modules that we will require for this project.
'''
USAGE:
python sparse_ae_kl.py --epochs 10 --reg_param 0.001 --add_sparse yes
'''
import torch
import torchvision
import torch.nn as nn
import matplotlib
import matplotlib.pyplot as plt
import torchvision.transforms as transforms
import torch.nn.functional as F
import torch.optim as optim
import os
import time
import numpy as np
import argparse
from tqdm import tqdm
from torchvision import datasets
from torch.utils.data import DataLoader
from torchvision.utils import save_image
matplotlib.style.use('ggplot')
Some of the important modules in the above code block are:
torch.nnwill allow us to access the PyTorch neural network layers likenn.Linearand many others.torchvisionmakes it really easier for us to download the predefined datasets and apply transforms to that data.torch.optimwill allow us to access the optimizers like Adam.DataLoaderwill help us to create our own train and test loaders.save_imagefromtorchvision.utilsmakes it easier to save the tensor images.argparsefor defining and parsing the command line arguments.
Constructing the Argument Parsers and Setting the Parameters
Here, we will construct our argument parsers and define some parameters as well. Let’s start with constructing the argument parser first.
# constructing argument parsers
ap = argparse.ArgumentParser()
ap.add_argument('-e', '--epochs', type=int, default=10,
help='number of epochs to train our network for')
ap.add_argument('-l', '--reg_param', type=float, default=0.001,
help='regularization parameter `lambda`')
ap.add_argument('-sc', '--add_sparse', type=str, default='yes',
help='whether to add sparsity contraint or not')
args = vars(ap.parse_args())
We are parsing three arguments using the command line arguments. They are:
--epochsdefine the number of epochs we want to train our autoencoder neural network for. The default value is 10.--reg_paramis the weight parameter \(\beta\). We have set the default weight to 0.001.--add_sparseindicates whether we want to add the KL divergence sparsity penalty or not. This takes a string, either ‘yes’ or ‘no’. For this tutorial, this will be ‘yes’ of course.
Reading and initializing those command-line arguments for easier use. We will also initialize some other parameters like learning rate, and batch size.
EPOCHS = args['epochs']
BETA = args['reg_param']
ADD_SPARSITY = args['add_sparse']
RHO = 0.05
LEARNING_RATE = 1e-4
BATCH_SIZE = 32
print(f"Add sparsity regularization: {ADD_SPARSITY}")
Lines 1, 2, and 3 initialize the command line arguments as EPOCHS, BETA, and ADD_SPARSITY. We initialize the sparsity parameter RHO at line 4. The learning rate is set to 0.0001 and the batch size is 32.
If you want you can also add these to the command line argument and parse them using the argument parsers. Because these parameters do not need much tuning, so I have hard-coded them.
Define the Transforms and Prepare the Dataset
To define the transforms, we will use the transforms module of PyTorch. For the transforms, we will only convert data to tensors. The following code block defines the transforms that we will apply to our image data.
# image transformations
transform = transforms.Compose([
transforms.ToTensor(),
])
The next block of code prepares the Fashion MNIST dataset.
trainset = datasets.FashionMNIST(
root='../input/data',
train=True,
download=True,
transform=transform
)
testset = datasets.FashionMNIST(
root='../input/data',
train=False,
download=True,
transform=transform
)
# trainloader
trainloader = DataLoader(
trainset,
batch_size=BATCH_SIZE,
shuffle=True
)
#testloader
testloader = DataLoader(
testset,
batch_size=BATCH_SIZE,
shuffle=False
)
- Starting from line 1 to line 12 we first prepare the
trainsetandtestset. The FashionMNIST data will be downloaded intoinput/datafolder. We are also applying thetransformto the datasets. - From line 14 to line 25, we prepare the iterable
trainloaderandtestloader. We have set theBATCH_SIZEas 32. Shuffling is only applied to thetrainloaderand not to thetestloader.
Most probably, if you have a GPU, then you can set the batch size to a much higher number like 128 or 256. That will make the training much faster than a batch size of 32.
Helper Functions
In this section, we will define some helper functions to make our work easier.
First, let’s define the functions, then we will get to the explanation part.
# get the computation device
def get_device():
if torch.cuda.is_available():
device = 'cuda:0'
else:
device = 'cpu'
return device
device = get_device()
# make the `images` directory
def make_dir():
image_dir = '../outputs/images'
if not os.path.exists(image_dir):
os.makedirs(image_dir)
make_dir()
# for saving the reconstructed images
def save_decoded_image(img, name):
img = img.view(img.size(0), 1, 28, 28)
save_image(img, name)
- First, at line 2, we define the function
get_device()that either gets a hold on the CUDA GPU device or the CPU depending on the availability. For neural network training, it is always preferable to have a GPU. - At line 11 we define the function
make_dir(). This creates a folderimagesinside theouputsfolder where all the autoencoder reconstructed images will be saved. - The final function, starting from line 18 is
save_decoded_image(). This function takes an image tensor and a name string as input parameters. It will save the tensor values as images after resizing them to appropriate width and height.
This marks the end of some of the preliminary things we needed before getting into the neural network coding. We will begin that from the next section.
Define the Autoencoder Model
We will call our autoencoder neural network module as SparseAutoencoder(). The neural network will consist of Linear layers only. The following code block defines the SparseAutoencoder().
# define the autoencoder model
class SparseAutoencoder(nn.Module):
def __init__(self):
super(SparseAutoencoder, self).__init__()
# encoder
self.enc1 = nn.Linear(in_features=784, out_features=256)
self.enc2 = nn.Linear(in_features=256, out_features=128)
self.enc3 = nn.Linear(in_features=128, out_features=64)
self.enc4 = nn.Linear(in_features=64, out_features=32)
self.enc5 = nn.Linear(in_features=32, out_features=16)
# decoder
self.dec1 = nn.Linear(in_features=16, out_features=32)
self.dec2 = nn.Linear(in_features=32, out_features=64)
self.dec3 = nn.Linear(in_features=64, out_features=128)
self.dec4 = nn.Linear(in_features=128, out_features=256)
self.dec5 = nn.Linear(in_features=256, out_features=784)
def forward(self, x):
# encoding
x = F.relu(self.enc1(x))
x = F.relu(self.enc2(x))
x = F.relu(self.enc3(x))
x = F.relu(self.enc4(x))
x = F.relu(self.enc5(x))
# decoding
x = F.relu(self.dec1(x))
x = F.relu(self.dec2(x))
x = F.relu(self.dec3(x))
x = F.relu(self.dec4(x))
x = F.relu(self.dec5(x))
return x
model = SparseAutoencoder().to(device)
- In the autoencoder neural network, we have an encoder and a decoder part. The encoder part (from line 7) starts with 784
in_fetures. This corresponds to the 28×28 number of pixels in the FashionMNIST images. - Similarly, the decoder part (from line 13) starts with
in_featuresof 16 and ends without_featuresof 784. - The encoding and decoding happens in the
forward()function. All the layers are passed through the ReLU activation function. - Line 35 loads the model onto the computation device.
We also need to define the optimizer and the loss function for our autoencoder neural network. For the loss function, we will use the MSELoss which is a very common choice in case of autoencoders. And for the optimizer, we will use the Adam optimizer.
# the loss function criterion = nn.MSELoss() # the optimizer optimizer = optim.Adam(model.parameters(), lr=LEARNING_RATE)
The learning rate for the Adam optimizer is 0.0001 as defined previously.
Defining Sparsity Penalty and KL Divergence
This section perhaps is the most important of all in this tutorial. Here, we will implement the KL divergence and sparsity penalty. We will go through the details step by step so as to understand each line of code.
First, of all, we need to get all the layers present in our neural network model. That is just one line of code and the following block does that.
# get the layers as a list model_children = list(model.children())
We get all the children layers of our autoencoder neural network as a list. Printing the layers will give all the linear layers that we have defined in the network.
Linear(in_features=784, out_features=256, bias=True) Linear(in_features=256, out_features=128, bias=True) Linear(in_features=128, out_features=64, bias=True) Linear(in_features=64, out_features=32, bias=True) Linear(in_features=32, out_features=16, bias=True) Linear(in_features=16, out_features=32, bias=True) Linear(in_features=32, out_features=64, bias=True) Linear(in_features=64, out_features=128, bias=True) Linear(in_features=128, out_features=256, bias=True)
Now, we will define the kl_divergence() function and the sparse_loss() function. The kl_divergence() function will return the difference between two probability distributions. The following code block defines the functions.
def kl_divergence(rho, rho_hat):
rho_hat = torch.mean(F.sigmoid(rho_hat), 1) # sigmoid because we need the probability distributions
rho = torch.tensor([rho] * len(rho_hat)).to(device)
return torch.sum(rho * torch.log(rho/rho_hat) + (1 - rho) * torch.log((1 - rho)/(1 - rho_hat)))
# define the sparse loss function
def sparse_loss(rho, images):
values = images
loss = 0
for i in range(len(model_children)):
values = model_children[i](values)
loss += kl_divergence(rho, values)
return loss
- From line 1, we have the
kl_divergence()function. It takes two input parameters,rhoandrho_hat.rhois the sparsity parameter value (RHO) that we have initialized to 0.05 earlier. rho_hatis the output of the image pixel values after going through the model layer-wise. The first calculation forrho_hathappens layer-wise insparse_loss()(line 11). Then we pass thevaluesas arguments tokl_divergence().- In
kl_divergence(), at line 2, we find the probabilities and the mean ofrho_hat. Then at line 3, we makerhothe same dimension asrho_hatso that we can calculate the KL divergence between them. - At line 4 we return the KL divergence between
rhoandrho_hat.
Note that the calculations happen layer-wise in the function sparse_loss(). We iterate through the model_children list and calculate the values. These values are passed to the kl_divergence() function and we get the mean probabilities as rho_hat. Finally, we return the total sparsity loss from sparse_loss() function at line 13.
The Training and Validation Functions
We will call the training function as fit() and the validation function as validate(). Let’s start with the training function.
The Training Function
The training function is a very simple one that will iterate through the batches using a for loop. We will go through the important bits after we write the code.
# define the training function
def fit(model, dataloader, epoch):
print('Training')
model.train()
running_loss = 0.0
counter = 0
for i, data in tqdm(enumerate(dataloader), total=int(len(trainset)/dataloader.batch_size)):
counter += 1
img, _ = data
img = img.to(device)
img = img.view(img.size(0), -1)
optimizer.zero_grad()
outputs = model(img)
mse_loss = criterion(outputs, img)
if ADD_SPARSITY == 'yes':
sparsity = sparse_loss(RHO, img)
# add the sparsity penalty
loss = mse_loss + BETA * sparsity
else:
loss = mse_loss
loss.backward()
optimizer.step()
running_loss += loss.item()
epoch_loss = running_loss / counter
print(f"Train Loss: {epoch_loss:.3f}")
# save the reconstructed images
save_decoded_image(outputs.cpu().data, f"../outputs/images/train{epoch}.png")
return epoch_loss
- At line 14, we first calculate the
mse_loss. - Starting from line 15, we first get the
sparsitypenalty value by executing thesparse_lossfunction. - Then at line 18, we multiply
BETA(the weight parameter) to the sparsity loss and add the value tomse_loss. This gives the final loss for that batch. - At lines 21 and 22, we backpropagate the gradients and update the parameters respectively.
- At line 25 we calculate the loss for that epoch.
- Line 29, saves the reconstructed images during the training loop.
The Validation Function
# define the validation function
def validate(model, dataloader, epoch):
print('Validating')
model.eval()
running_loss = 0.0
counter = 0
with torch.no_grad():
for i, data in tqdm(enumerate(dataloader), total=int(len(testset)/dataloader.batch_size)):
counter += 1
img, _ = data
img = img.to(device)
img = img.view(img.size(0), -1)
outputs = model(img)
loss = criterion(outputs, img)
running_loss += loss.item()
epoch_loss = running_loss / counter
print(f"Val Loss: {epoch_loss:.3f}")
# save the reconstructed images
outputs = outputs.view(outputs.size(0), 1, 28, 28).cpu().data
save_image(outputs, f"../outputs/images/reconstruction{epoch}.png")
return epoch_loss
We are not calculating the sparsity penalty value during the validation iterations. Also, everything is within a with torch.no_grad() block so that the gradients do not get calculated. We do not need to backpropagate the gradients or update the parameters as well. Line 22 saves the reconstructed images during the validation. These are the set of images that we will analyze later in this tutorial.
Executing the Training and Validation Functions
While executing the fit() and validate() functions, we will store all the epoch losses in train_loss and val_loss lists respectively.
# train and validate the autoencoder neural network
train_loss = []
val_loss = []
start = time.time()
for epoch in range(EPOCHS):
print(f"Epoch {epoch+1} of {EPOCHS}")
train_epoch_loss = fit(model, trainloader, epoch)
val_epoch_loss = validate(model, testloader, epoch)
train_loss.append(train_epoch_loss)
val_loss.append(val_epoch_loss)
end = time.time()
print(f"{(end-start)/60:.3} minutes")
# save the trained model
torch.save(model.state_dict(), f"../outputs/sparse_ae{EPOCHS}.pth")
- We train the autoencoder neural network for the number of epochs as specified in the command line argument.
- At lines 9 and 10, we append the train and validation losses to the respective lists.
- Line 15 saves the trained autoencoder neural network.
Finally, we just need to save the loss plot. We will do that using Matplotlib.
# loss plots
plt.figure(figsize=(10, 7))
plt.plot(train_loss, color='orange', label='train loss')
plt.plot(val_loss, color='red', label='validataion loss')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.legend()
plt.savefig('../outputs/loss.png')
plt.show()
This marks the end of all the python coding. Now we just need to execute the python file.
Execute the Python File
From within the src folder type the following in the terminal.
python sparse_ae_kl.py --epochs 25 --reg_param 0.001 --add_sparse yes
We are training the autoencoder neural network model for 25 epochs. The following is a short snippet of the output that you will get.
Add sparsity regularization: yes Epoch 1 of 25 Training 100%|██████████████████████████████████████████████████████████████| 1875/1875 [01:23<00:00, 22.38it/s] Train Loss: 0.093 Validating 313it [00:01, 209.92it/s] Val Loss: 0.063 Epoch 2 of 25 Training 100%|██████████████████████████████████████████████████████████████| 1875/1875 [01:03<00:00, 29.69it/s] Train Loss: 0.061 Validating 313it [00:01, 200.28it/s] Val Loss: 0.044 ... Epoch 25 of 25 Training 100%|██████████████████████████████████████████████████████████████| 1875/1875 [01:04<00:00, 29.25it/s] Train Loss: 0.026 Validating 313it [00:01, 228.07it/s] Val Loss: 0.021
Analyzing the Results
First, let’s take a look at the loss graph that we have saved.
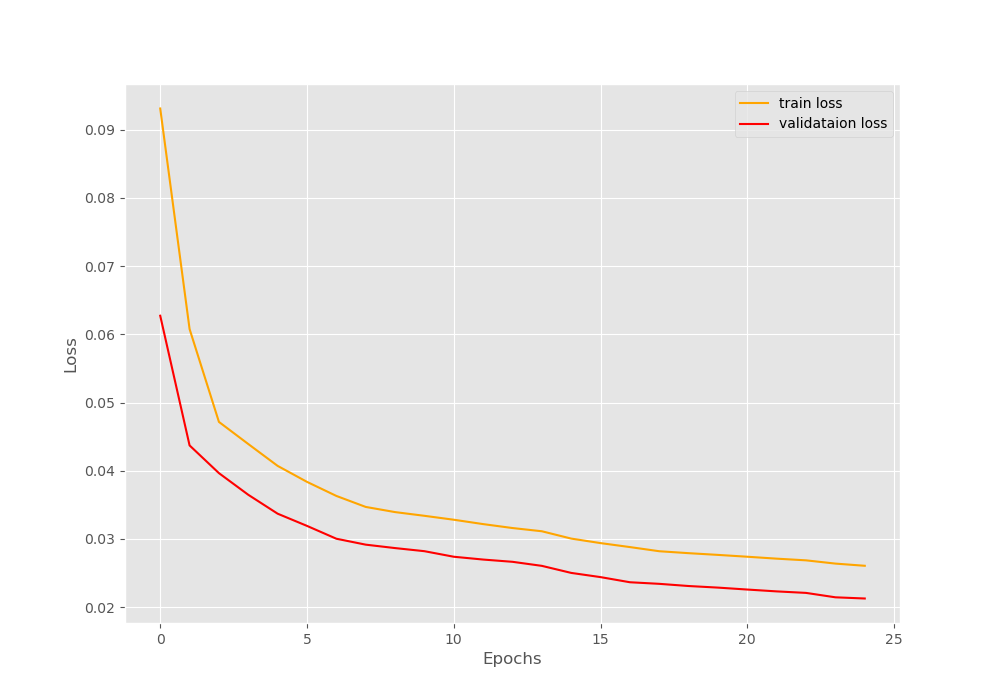
You can see that the training loss is higher than the validation loss until the end of the training. This because of the additional sparsity penalty that we are adding during training but not during validation.
Let’s take a look at the images that the autoencoder neural network has reconstructed during validation.
The above image shows that reconstructed image after the first epoch. We can see that the autoencoder finds it difficult to reconstruct the images due to the additional sparsity.
Now, let’s take look at a few other images.


After the 10th iteration, the autoencoder model is able to reconstruct the images properly to some extent. By the last epoch, it has learned to reconstruct the images in a much better way.
Summary and Conclusion
The above results and images show that adding a sparsity penalty prevents an autoencoder neural network from just copying the inputs to the outputs. Instead, it learns many underlying features of the data.
In this tutorial you learned:
- The theory and mathematical concepts behind the KL divergence.
- How to train an autoencoder neural network with KL divergence using the PyTorch deep learning library.
- How adding a sparsity penalty helps an autoencoder model to learn the features of a data.
If you want to point out some discrepancies, then please leave your thoughts in the comment section. If you have any ideas or doubts, then you can use the comment section as well and I will try my best to address them.
You can contact me using the Contact section. You can also find me on LinkedIn, and X.

Thank you for this wonderful article, but I have a question here. In the tutorial, the average of the activations of each neure is computed first to get the spaese, so we should get a rho_hat whose dimension equals to the number of hidden neures. But in the code, it is the average activations of the inputs being computed, and the dimension of rho_hat equals to the size of batch. I am wondering why, and thanks once again.
First of all, I am glad that you found the article useful.
Now, coming to your question. I think that you are concerned that applying the KL-Divergence batch-wise instead of input size wise would give us faulty results while backpropagating. I think that it is not a problem. This is because even if we calculating KLD batch-wise, they are all torch tensors. This means that we can easily apply loss.item() and loss.backwards() and they will all get correctly calculated batch-wise just like any other predefined loss functions in the PyTorch library.
I believe there’s a typo in the code. In the line: sparsity = sparse_loss(RHO, rho_hat=img), img refers to the original input image, however the description of rho_hat states that it is the image after it has gone through the model. This is why the KL divergence is not affected by training, because there is nothing during model training that actually affects the sparsity loss. sparsity = sparse_loss(RHO, rho_hat=outputs) should fix the issue.
Nevermind! The first layer uses the original input, but in the for loop the output of the first layer is used for the second layer and the output of the second layer is used for the third layer etc. etc. Please ignore my comment.
Thank you for the update.
Hi,
First of all, thank you a lot for this useful article.
I have followed all the steps you suggested, but I encountered a problem. The kl_loss term does not affect the learning phase at all. To make me sure of this problem, I have made two tests.
1) The kl divergence does not decrease, but it increases during the learning phase.
2) If I set to zero the MSE loss, then NN parameters are not updated.
Any suggestion?
Hello Federico, thank you for reaching out. Let’s take your concerns one at a time.
1. I tried saving and plotting the KL divergence. In my case, it started off with a value of 16 and decreased to somewhere between 0 and 1. Could you please check the code again on your part? Maybe you made some minor mistakes and that’s why it is increasing instead of decreasing.
2. Coming to the MSE loss. I could not quite understand setting MSE to zero. This is because MSE is the loss that we calculate and not something we set manually. But if you are saying that you set the MSE to zero and the parameters did not update, then that it is to be expected. The reason being, when MSE is zero, then this means that the model is not making any more errors and therefore, the parameters will not update. Most probably we will never quite reach a perfect zero MSE.
I hope I was able to help you.
Honestly, there are few things concerning me here. First, why are you taking the sigmoid of rho_hat? You want your activations to be zero, not sigmoid(activations), right? In your case, KL divergence has minima when activations go to -infinity, as sigmoid tends to zero. Second, how do you access activations of other layers, I get errors when using your method. Thanks in advance 🙂
Hello. I will take a look at the code again considering all the questions that you have raised. Just one query from my side. Can I ask what errors are you getting? Are these errors when using my code as it is or something different? Waiting for your reply.