
In this tutorial, we will try our hands on learning action recognition in videos using deep learning and PyTorch, with convolutional neural networks.
In deep learning, you must have used CNN (Convolutional Neural Network) for a number of learning tasks. These may include image recognition, classification, object localization and detection, and many more. But in this article, we will learn how to classify (recognize) actions in videos. In short, we will give video input to a trained model, and the model will tell us what is the action that is taking place in the video.
What Will You Learn in this Article?
So, what are you actually going to learn from completing this tutorial?
- First, you will sample a small subset of data from a large dataset to train a neural network.
- You will train a custom deep learning model for action recognition on images consisting of sports activities.
- You will then use the trained model to classify videos. In other words, the neural network model will be able to tell to what sports category the video belongs to.
But to give you a motivational boost of following this tutorial till the end, I am providing a short clip of what kinds of results to expect after this tutorial.
And let’s not forget that after training your neural network to recognize certain types of videos, you can also train it on another bigger dataset and convert it into a much larger project.
Inspiration
This tutorial is highly inspired by this article by Adrian Rosebrock. In the article, he teaches how to classify videos using deep learning and the Keras library. If you are more of a Keras and TensorFlow user, then you may benefit from checking out Adrian’s post.
In that article, he also pointed out the dataset by Anubhav Maity. The dataset was in the form of a GitHub repository. But I am unable to find that now. So, we will be using a dataset from this GitHub repository that contains a dataset almost completely similar to the previous one.
Difference Between Adrian’s Blog Post and this Tutorial
We will not be replicating Adrian’s post as it is. So, we will make some changes so that you will be learning something new in this article.
The very first change is that Adrian used the Keras deep learning library in his post. But we will be using PyTorch in this article. There are some other libraries as well that you may need to install before moving further. We will go on to those shortly.
Now, the dataset contains a whole lot of categories (22 in total). But Adrian used the ‘weight lifting’, ‘football’, and ‘tennis’ categories to train a ResNet-50 model using transfer learning.
In this article, we will use chess, basketball, and boxing categories for training the deep learning model. Also, we will not use transfer learning. Instead, we will use a custom neural network model for training on the data and testing.
The Dataset
The original dataset was present in Anubhav Maity’s GitHub repository. This was also mentioned in Adrian’s blog post. But as I am unable to find it now, so, I am providing a google drive link to the new dataset that you can download. You can download the dataset by clicking on the button below.
The dataset consists of sports activities spanning over 22 categories. All the images are inside their respective folders and they are named appropriately as well. The following are the categories that are present in the dataset:
| 1. Badminton | 12. Ice Hockey |
| 2. Baseball | 13. Kabaddi |
| 3. Basketball | 14. Moto GP |
| 4. Boxing | 15. Shooting |
| 5. Chess | 16. Swimming |
| 6. Cricket | 17. Table Tennis |
| 7. Fencing | 18. Volleyball |
| 8. Football | 19. Weight Lifting |
| 9. Formula 1 | 20. Wrestling |
| 10. Gymnastics | 21. WWE |
| 11. Hockey | 22. Tennis |
Table 1 lists all the categories of sports activities that are present in the dataset. But we will not be training our model on all the categories. That will demand a lot of time and resources. Instead, we will just focus on training our deep learning model on basketball, boxing, and chess categories.

Figure 1 shows some of the images from the dataset, You can explore the dataset a bit more to get familiar with it. The dataset also has a bunch of URL files. These are the URLs to the images for each category. We will not be needing those URL files, so, you can ignore them for now.
Before moving further, let’s discuss how to achieve our goal of video classification using deep learning by training a neural network model on just images.
From Images to Video Action Recognition in Deep Learning using PyTorch
We know that in image classification, we will carry out the labeling of images into one of many categories using a neural network model.
We train a neural network on a set of images and their corresponding labels. After training, to test the model, we give the model an image as an input and it outputs a category for us. And hopefully, this output category is the same as that of the test image. This is the gist of image classification in deep learning.
But now we want to carry out video classification. How to approach the problem? First of all, we will train a convolutional neural network model on the image categories that we have discussed above. Suppose that the training is complete. Then comes the testing phase. For testing:
- First, we will read a video using OpenCV.
- Get each frame of the video and treat it as a separate image file.
- Get the predictions on each frame (to be treated as an image).
- Hopefully, the model will give a correct prediction of action for each frame.
- Output the video frame and the corresponding label with it.
So, while testing, we will a video file for sure. But we will treat each of the frame as a separate image and get the predictions on each frame. Finally, we will show the frame on the screen along with the predicted output.
This may sound a bit complex in theory, but it is quite simple in practice. You will realize this better when we reach that point in this tutorial.
Installing the Required Libraries
You need two very important libraries for this tutorial. One is obviously PyTorch, and the other one is Albumentations. Albumentations is a very good image augmentation library that I use on a regular basis. The others are very generic libraries which you will be already having in your working environment. If not, feel free to install as you go,
Now, let’s move on to the directory structure of this tutorial.
Directory Structure
We will follow a simple yet efficient directory structure for this tutorial.
├───input
│ ├───data
│ │ ├───badminton
│ │ ├───baseball
│ │ ├───basketball
│ │ ├───boxing
│ │ ...
│ └───example_clips
│ basketball.mp4
│ boxing1.mp4
│ chess.mp4
| | data.csv
├───outputs
└───src
│ cnn_models.py
│ prepare_data.py
│ test.py
│ train.py
- You can extract the
data.zipfile inside theinputfolder and you will get all the subfolders containing the sports images according to the categories. inputfolder also contains theexample_clipssubfolder that contains the short video clips that we will test our trained deep learning model on.outputsfolder will contain all the output files. These include the loss and accuracy graph plots, the trained model, and some other files that we will discover as we move further.srccontains all the python scripts.prepare_data.py: To prepare the dataset for the training images and thedata.csvfile.cnn_models.py: Will contain the neural network model.train.py: Will contain the training and validation scripts.test.py: This python file is for testing on the trained neural network model on theexample_clipsvideos.
We will use the clips inside the input/example_clips folder for testing our trained network. I am not providing the videos directly with this post. Instead, I am providing the links and you can use those links to obtain the videos. This ensures that the work and creativity of the creators of those videos remain intact and protected. The following are the links to the videos.
basketball.mp4video.boxing1.mp4video: Best Knockouts and Funny Moments in Boxing.chess.mp4video.
Next, we will start the best part of this tutorial. We will move on to coding our way through all the things that we have discussed above.
Action Recognition in Videos using Deep Learning and PyTorch
Beginning from this section, we will start to write the python code for this tutorial. In each new part, I will be telling exactly which python file the code goes into to avoid confusion.
Let’s start with preparing our data.
Preparing the Data and data.csv File
First, we will prepare our data. In this section, we will write the code to create the data.csv file. This CSV file will contain the image paths as the instances and the numerical category as the targets.
Things will become clearer when we write the code. All the code from here on will go into the prepare_data.py file.
We can begin by importing the modules.
import pandas as pd import joblib import os import numpy as np from tqdm import tqdm from sklearn.preprocessing import LabelBinarizer
The above are all the libraries and modules that we will need for preparing our data. We will use the Scikit-Learn LabelBinarizer to create the binarized labels for the categories that we will use.
Get All the Image Folder Paths
We can get all the 22 image folder paths as a list. This will make it easier for us to prepare the data. The following block of code shows how to do it.
# get all the image folder paths
all_paths = os.listdir('../input/data')
folder_paths = [x for x in all_paths if os.path.isdir('../input/data/' + x)]
print(f"Folder paths: {folder_paths}")
print(f"Number of folders: {len(folder_paths)}")
- At line 2,
all_pathslist stores all the directory and URL file names that are inside theinput/datafolder. But we do not need the URL files. - Line 3 checks which of the items in the
all_pathslist are directories and then stores those only infolder_path.
That’s it. Using those two lines of code, we have all the image folder paths.
Also, we do not want all the images. We will train our network only on basketball, boxing, and chess images. We will just create a list containing these folder names and use them later to obtain those images only. And we will create a DataFrame also to save all the image paths and the labels.
# we will create the data for the following labels, # add more to list to use those for creating the data as well create_labels = ['basketball', 'boxing', 'chess'] # create a DataFrame data = pd.DataFrame()
If you want to create a bigger dataset, then you can just add more folder names to the list at line 3 in the above code block. You will get to see shortly how we use the list.
At line 6, we create an empty DataFrame called data.
Add the Image Paths to the DataFrame
Now, we will add the image paths to the data DataFrame. Remember that we will only add the image paths for those images that correspond to the directories in the create_labels list.
If you explore the images inside the folder, then you will find some images with .gif extension. We will not be using those images as they can cause problems when carrying out image augmentation. We will choose the images with JPG, PNG, jpg, or png extensions.
image_formats = ['jpg', 'JPG', 'PNG', 'png'] # we only want images that are in this format
labels = []
counter = 0
for i, folder_path in tqdm(enumerate(folder_paths), total=len(folder_paths)):
if folder_path not in create_labels:
continue
image_paths = os.listdir('../input/data/'+folder_path)
label = folder_path
# save image paths in the DataFrame
for image_path in image_paths:
if image_path.split('.')[-1] in image_formats:
data.loc[counter, 'image_path'] = f"../input/data/{folder_path}/{image_path}"
labels.append(label)
counter += 1
- At line 1 we create a
image_formatslist that specifies the image extensions that we want. Then at line 2, we create an empty listlabels. And line 3 creates a counter variable. - Beginning from line 4, we have a
forloop going over all the folder names. We check whether the folder names belong to the image folders that we want at line 5. - At line 7,
image_pathsstores all the image names that are inside the corresponding folder. And the label is the folder name. - From line 10, we have another
forloop which stores the image paths on theimage_pathcolumn of thedataDataFrame. And we add the label name to thelabelslist that we will use later.
One-Hot Encoding the Labels
Now, we need to one-hot encode the labels. If you need a quick reminder to one-hot encoding, then you can check this article.
The following block of code one-hot encodes the labels.
labels = np.array(labels) # one-hot encode the labels lb = LabelBinarizer() labels = lb.fit_transform(labels)
The variable lb contains all the binarized labels. It contains an attribute called classes_. The length of this attribute gives the total number of classes that we have. We can use this length while building our neural network. We need not hardcode the number of output classes in the final classification layer. We can use this length to specify the number of classes.
Next, we will add the labels to the corresponding image paths in the target column of the data DataFrame.
if len(labels[0]) == 1:
for i in range(len(labels)):
index = labels[i]
data.loc[i, 'target'] = int(index)
elif len(labels[0]) > 1:
for i in range(len(labels)):
index = np.argmax(labels[i])
data.loc[i, 'target'] = int(index)
Shuffling the Data and Saving it as a CSV File
There are only a few things left. We will shuffle the data DataFrame. Then we will save it as a CSV file. Also, remember that we have the binarized labels, the lb variable. We will save it as a .pkl file so that we can load it whenever we want.
# shuffle the dataset
data = data.sample(frac=1).reset_index(drop=True)
print(f"Number of labels or classes: {len(lb.classes_)}")
print(f"The first one hot encoded labels: {labels[0]}")
print(f"Mapping the first one hot encoded label to its category: {lb.classes_[0]}")
print(f"Total instances: {len(data)}")
# save as CSV file
data.to_csv('../input/data.csv', index=False)
# pickle the binarized labels
print('Saving the binarized labels as pickled file')
joblib.dump(lb, '../outputs/lb.pkl')
print(data.head(5))
Just keep in mind that the data.csv file saves in the input folder and lb.pkl file saves in the outputs folder.
All the data preparation part is complete. Now, we just need to execute the prepare_data.py file. Type the following command in the terminal while being inside the src folder.
python prepare_data.py
You should see the following output.
Folder paths: ['badminton', 'baseball', 'basketball', 'boxing', 'chess', 'cricket', 'fencing', 'football', 'formula1', 'gymnastics', 'hockey', 'ice_hockey', 'kabaddi', 'models', 'motogp', 'shooting', 'swimming', 'table_tennis', 'tennis', 'volleyball', 'weight_lifting', 'wrestling', 'wwe']
Number of folders: 23
...
Number of labels or classes: 3
The first one hot encoded labels: [1 0 0]
Mapping the first one hot encoded label to its category: basketball
Total instances: 1592
Saving the binarized labels as pickled file
image_path target
0 ../input/data/boxing/00000542.jpg 1.0
1 ../input/data/boxing/00000024.jpg 1.0
2 ../input/data/chess/00000051.jpg 2.0
3 ../input/data/boxing/00000227.jpg 1.0
4 ../input/data/boxing/00000614.jpg 1.0
We have a total of 1592 images. Let’s hope that these are enough for getting good training and validation results for our deep learning neural network model.
Building Our Deep Learning Neural Network Architecture
In this section, we will build our neural network model. The model will be very simple. The code in this section will go into the cnn_models.py file.
The model will have four convolutional layers and two fully connected layers. Out of those two fully connected layers, one will be the final classification layer. We will also have a Max Pooling layer that we will apply to the activations of each convolutional layer. The neural network model is not too deep, but just enough to call it deep learning.
import torch
import torch.nn as nn
import torch.nn.functional as F
import joblib
# load the binarized labels file
lb = joblib.load('../outputs/lb.pkl')
class CustomCNN(nn.Module):
def __init__(self):
super(CustomCNN, self).__init__()
self.conv1 = nn.Conv2d(3, 16, 5)
self.conv2 = nn.Conv2d(16, 32, 5)
self.conv3 = nn.Conv2d(32, 64, 3)
self.conv4 = nn.Conv2d(64, 128, 5)
self.fc1 = nn.Linear(128, 256)
self.fc2 = nn.Linear(256, len(lb.classes_))
self.pool = nn.MaxPool2d(2, 2)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = self.pool(F.relu(self.conv3(x)))
x = self.pool(F.relu(self.conv4(x)))
bs, _, _, _ = x.shape
x = F.adaptive_avg_pool2d(x, 1).reshape(bs, -1)
x = F.relu(self.fc1(x))
x = self.fc2(x)
return x
You can see that we are loading the lb.pkl file at line 7. We are using the len(lb.classes_) to specify the number of output classes for self.fc2 at line 18.
Now, we can happily move on to writing the code for training our neural network.
Writing the Training Code for Action Recognition using Deep Learning
From here on, we will write the training code for this tutorial. All the code will go into the train.py file.
Let’s begin with importing the modules and libraries.
import torch
import argparse
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import joblib
import albumentations
import torch.optim as optim
import os
import cnn_models
import matplotlib
import matplotlib.pyplot as plt
import time
import pandas as pd
matplotlib.style.use('ggplot')
from imutils import paths
from sklearn.preprocessing import LabelBinarizer
from sklearn.model_selection import train_test_split
from torch.utils.data import DataLoader, Dataset
from tqdm import tqdm
from PIL import Image
We are using the ggplot for matplotlib to add some style to the plots that we will save after training.
Next, we will construct the argument parser and parse the arguments. We have two command-line arguments for this python file.
# construct the argument parser
ap = argparse.ArgumentParser()
ap.add_argument('-m', '--model', required=True,
help='path to save the trained model')
ap.add_argument('-e', '--epochs', type=int, default=75,
help='number of epochs to train our network for')
args = vars(ap.parse_args())
--modelspecifies the path name for saving the trained neural network model.--epochsspecifies the number of epochs that we will train the neural network model for.
We need to specify the learning parameters and the computation device as well (CPU or GPU).
# learning_parameters
lr = 1e-3
batch_size = 32
device = 'cuda:0'
print(f"Computation device: {device}\n")
We are using a learning rate of 0.001 and a batch size of 32.
Read the Data CSV File and Split into Training and Validation Set
Here, we will read the data.csv file. We will get hold of the image paths and the corresponding labels. Then we will split the dataset into training and validation set.
# read the data.csv file and get the image paths and labels
df = pd.read_csv('../input/data.csv')
X = df.image_path.values # image paths
y = df.target.values # targets
(xtrain, xtest, ytrain, ytest) = train_test_split(X, y,
test_size=0.10, random_state=42)
print(f"Training instances: {len(xtrain)}")
print(f"Validation instances: {len(xtest)}")
- At line 2, we read the
data.csvfile. - Line 3 stores all the image paths in the variable
Xand line 4 stores all the labels iny. - At line 6, we split the data into training and validation set. We are using 90% of the data for training and 10% of the data for validation.
Preparing the Custom Dataset
In this section, we will prepare our custom dataset module using the PyTorch Dataset class.
We will call our dataset module as ImageDataset().
# custom dataset
class ImageDataset(Dataset):
def __init__(self, images, labels=None, tfms=None):
self.X = images
self.y = labels
# apply augmentations
if tfms == 0: # if validating
self.aug = albumentations.Compose([
albumentations.Resize(224, 224, always_apply=True),
])
else: # if training
self.aug = albumentations.Compose([
albumentations.Resize(224, 224, always_apply=True),
albumentations.HorizontalFlip(p=0.5),
albumentations.ShiftScaleRotate(
shift_limit=0.3,
scale_limit=0.3,
rotate_limit=15,
p=0.5
),
])
def __len__(self):
return (len(self.X))
def __getitem__(self, i):
image = Image.open(self.X[i])
image = image.convert('RGB')
image = self.aug(image=np.array(image))['image']
image = np.transpose(image, (2, 0, 1)).astype(np.float32)
label = self.y[i]
return (torch.tensor(image, dtype=torch.float), torch.tensor(label, dtype=torch.long))
- In the
__init__()function, we initialize the image paths and the image labels (lines 4 and 5). - Then from lines 8 till 22, we define the image augmentations for validation and training.
- For validation images, we are only resizing them.
- For the training images, we are resizing and horizontally flipping with a 50% probability.
- We are also shifting, scaling, and rotating the images with a 50% probability.
- In the
__getitem__()function, starting from line 27:- First, we are reading the image using PIL Image and converting it into RGB format.
- Then we are augmenting the images at line 30 and making them channels-first (c, h, w) at line 31.
- Then we are getting the labels and finally returning the images and labels as torch tensors.
Defining the Training and Validation Data Loaders
We will define the training and validation data loaders here.
train_data = ImageDataset(xtrain, ytrain, tfms=1) test_data = ImageDataset(xtest, ytest, tfms=0) # dataloaders trainloader = DataLoader(train_data, batch_size=batch_size, shuffle=True) testloader = DataLoader(test_data, batch_size=batch_size, shuffle=False)
First, we define the train_data and test_data as two instances of the ImageDataset() class. Then we define the trainloader and testloader with a batch size of 32. We are shuffling the trainloader only.
Initializing the Neural Network Model
Since we have already defined our deep learning model in the cnn_models.py file, we can just call the module to initialize the neural network model here.
model = cnn_models.CustomCNN().to(device)
print(model)
# total parameters and trainable parameters
total_params = sum(p.numel() for p in model.parameters())
print(f"{total_params:,} total parameters.")
total_trainable_params = sum(
p.numel() for p in model.parameters() if p.requires_grad)
print(f"{total_trainable_params:,} training parameters.")
At line 1, we are initializing the neural network model and loading it onto the computation device as well.
From lines 5 to 9, we are counting and printing the total number of learning parameters in our model. This will give us a better idea of how big our deep learning model is actually.
Next, we need to define the loss function and optimizer. We will use the Adam optimizer and the CrossEntropyLoss.
# optimizer optimizer = optim.Adam(model.parameters(), lr=lr) # loss function criterion = nn.CrossEntropyLoss()
The learning rate for the Adam optimizer is 0.001 that we have defined above.
For better learning, let’s define a learning rate scheduler as well.
scheduler = torch.optim.lr_scheduler.ReduceLROnPlateau(
optimizer,
mode='min',
patience=5,
factor=0.5,
min_lr=1e-6,
verbose=True
)
We are using the PyTorch ReduceLROnPlateau() learning rate scheduler with a patience value of 0.5 and a factor of 0.5 We will apply the scheduler step to the loss values after each epoch. Suppose that the loss values do not improve for 5 epochs consecutively. Then the learning rate will change by a factor of 0.5. Specifically, new_lr = old_lr * 0.5. There is no guarantee that we will hit a learning plateau. But still, it never hurts to have a learning rate scheduler in place.
The Training Function
Here, we will define our training function and call it fit(). This takes in two input parameters. One is the neural network model and the other is the train dataloader.
# training function
def fit(model, train_dataloader):
print('Training')
model.train()
train_running_loss = 0.0
train_running_correct = 0
for i, data in tqdm(enumerate(train_dataloader), total=int(len(train_data)/train_dataloader.batch_size)):
data, target = data[0].to(device), data[1].to(device)
optimizer.zero_grad()
outputs = model(data)
loss = criterion(outputs, target)
train_running_loss += loss.item()
_, preds = torch.max(outputs.data, 1)
train_running_correct += (preds == target).sum().item()
loss.backward()
optimizer.step()
train_loss = train_running_loss/len(train_dataloader.dataset)
train_accuracy = 100. * train_running_correct/len(train_dataloader.dataset)
print(f"Train Loss: {train_loss:.4f}, Train Acc: {train_accuracy:.2f}")
return train_loss, train_accuracy
We are keeping track of the batch-wise loss and accuracy using the train_running_loss and train_running_correct. From line 7, we start looping over the train dataloader batches. As usual, we calculate the loss, accuracy, backpropagate the gradients, and update the parameters. At lines 18 and 19, we calculate the epoch-wise loss and accuracy. Finally, we return the epoch loss and accuracy values at line 23.
Note: Always remember to enter training model before iterating over the training batches. We have done so, at line 4 using the model.train() function.
The Validation Function
The validation function is going to be very similar to the training function. We will call it validate(). It will also take in two input parameters, the model and the validation dataloader.
As it is the validation of the data, we will neither backpropagate the gradients nor update any parameters as well.
#validation function
def validate(model, test_dataloader):
print('Validating')
model.eval()
val_running_loss = 0.0
val_running_correct = 0
with torch.no_grad():
for i, data in tqdm(enumerate(test_dataloader), total=int(len(test_data)/test_dataloader.batch_size)):
data, target = data[0].to(device), data[1].to(device)
outputs = model(data)
loss = criterion(outputs, target)
val_running_loss += loss.item()
_, preds = torch.max(outputs.data, 1)
val_running_correct += (preds == target).sum().item()
val_loss = val_running_loss/len(test_dataloader.dataset)
val_accuracy = 100. * val_running_correct/len(test_dataloader.dataset)
print(f'Val Loss: {val_loss:.4f}, Val Acc: {val_accuracy:.2f}')
return val_loss, val_accuracy
At line 4, we are entering evaluation mode first. Just like training, we are keeping track of batch-wise loss, accuracy, and epoch-wise loss and accuracy values. The validation loop is inside the with torch.no_grad() block, so that the gradients do not get calculate. Calculating the gradients during validation can many times cause Out Of Memory errors.
Executing the Training and Validation Functions for the Specified Number of Epochs
We will train and validate our neural network model on the data as per the number of epochs that is specified in the command line arguments.
train_loss , train_accuracy = [], []
val_loss , val_accuracy = [], []
start = time.time()
for epoch in range(args['epochs']):
print(f"Epoch {epoch+1} of {args['epochs']}")
train_epoch_loss, train_epoch_accuracy = fit(model, trainloader)
val_epoch_loss, val_epoch_accuracy = validate(model, testloader)
train_loss.append(train_epoch_loss)
train_accuracy.append(train_epoch_accuracy)
val_loss.append(val_epoch_loss)
val_accuracy.append(val_epoch_accuracy)
scheduler.step(val_epoch_loss)
end = time.time()
print(f"{(end-start)/60:.3f} minutes")
After each epoch, we are appending the training and loss and accuracy values to the train_loss and train_accuracy lists respectively. The same for the validation loss and accuracy values.
At line 12, we have the learning rate scheduler step to check whether we need to reduce the learning rate or not.
Finally, we just need to save the accuracy and loss graphical plots. We will also save the trained model to the disk so that we can carry out testing any time we want without training the model again.
# accuracy plots
plt.figure(figsize=(10, 7))
plt.plot(train_accuracy, color='green', label='train accuracy')
plt.plot(val_accuracy, color='blue', label='validataion accuracy')
plt.xlabel('Epochs')
plt.ylabel('Accuracy')
plt.legend()
plt.savefig('../outputs/accuracy.png')
plt.show()
# loss plots
plt.figure(figsize=(10, 7))
plt.plot(train_loss, color='orange', label='train loss')
plt.plot(val_loss, color='red', label='validataion loss')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.legend()
plt.savefig('../outputs/loss.png')
plt.show()
# serialize the model to disk
print('Saving model...')
torch.save(model.state_dict(), args['model'])
print('TRAINING COMPLETE')
Executing the train.py File
Its time to execute the train.py file and train our deep neural network model on the data.
We will train the model for 75 epochs. Execute the train.py file while being within the src folder in the terminal.
python train.py --model ../outputs/sports.pth --epochs 75
Below is the clipped version of the training outputs that we get on the terminal.
Computation device: cuda:0 Training instances: 1432 Validation instances: 160 CustomCNN( (conv1): Conv2d(3, 16, kernel_size=(5, 5), stride=(1, 1)) (conv2): Conv2d(16, 32, kernel_size=(5, 5), stride=(1, 1)) (conv3): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1)) (conv4): Conv2d(64, 128, kernel_size=(5, 5), stride=(1, 1)) (fc1): Linear(in_features=128, out_features=256, bias=True) (fc2): Linear(in_features=256, out_features=3, bias=True) (pool): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) ) 271,267 total parameters. 271,267 training parameters. Epoch 1 of 75 Training 45it [00:07, 5.67it/s] Train Loss: 0.0398, Train Acc: 50.28 Validating 100%|████████████████████████████████████████████████████████████████████| 5/5 [00:00<00:00, 8.84it/s] Val Loss: 0.0305, Val Acc: 55.00 ... Epoch 75 of 75 Training 45it [00:06, 6.65it/s] Train Loss: 0.0036, Train Acc: 96.44 Validating 100%|████████████████████████████████████████████████████████████████████| 5/5 [00:00<00:00, 8.87it/s] Val Loss: 0.0116, Val Acc: 86.25 Epoch 75: reducing learning rate of group 0 to 7.8125e-06. 9.799 minutes Saving model... TRAINING COMPLETE
By the end of training, we are achieving a training accuracy of 96.44% and validation accuracy of 86.25%. These results are actually good considering the small amount of data and the simple neural network model that we are using. One more thing.
Although, not visible due to the clipped outputs, we have hit a learning rate plateau almost six times during training. So, the learning rate scheduler actually was used six times to reduce the learning rate. You should experience the same things while training on your own.
Analyzing the Loss and Accuracy Graphs
Let’s take a look at the loss graph plot first.
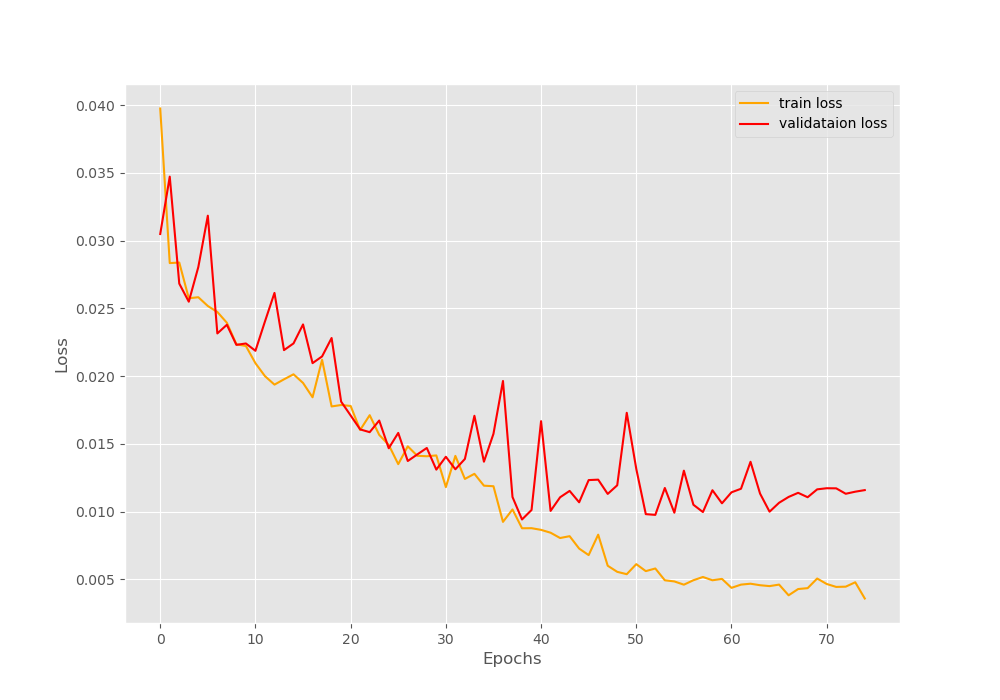
We can see that around the last 10 epochs, the validation loss is increasing bit. But the training loss is still decreasing. So, perhaps, using a lowered value factor in the learning rate scheduler would have helped. You can try that out and let me know in the comment section of your findings.
Moving on to the accuracy graph plot.
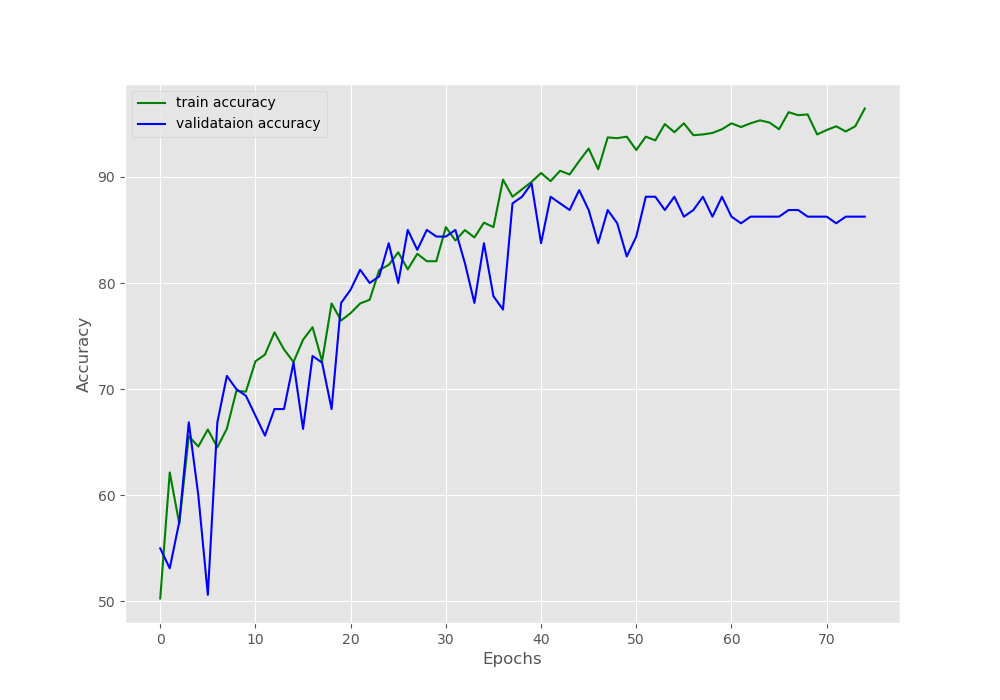
In the accuracy plot also, the validation accuracy is decreasing a bit after 60 epochs. Let’s hope that the model has learned the features well and can predict the video frames correctly while testing.
Testing the Trained Model for Action Recognition using Deep Learning on Real-Time Videos
We will write the test code for this tutorial now. All the code in this section will go into the test.py file.
I hope that you have obtained the video clips for testing using the links that I have provided in one of the previous sections.
Let’s start with importing the required modules and libraries.
''' USAGE: python test.py --model ../outputs/sports.pth --label-bin ../outputs/lb.pkl --input ../input/example_clips/chess.mp4 --output ../outputs/chess.mp4 ''' import torch import numpy as np import argparse import joblib import cv2 import torch.nn as nn import torch.nn.functional as F import time import cnn_models import albumentations from torchvision.transforms import transforms from torch.utils.data import Dataset, DataLoader from PIL import Image
You can see that we are importing both, OpenCV as well as the Python Imaging Library (PIL). This is because we will use OpenCV to read the video frames. And while training we have read the images using PIL. So, we will test our model by giving PIL format images to the model. The main reason for this is because of the difference between the RGB (Red, Green, Blue) and BGR (Blue, Green, Red) color formats of PIL and OpenCV.
Constructing the Argument Parser
We have four command line arguments while executing the test.py file.
# construct the argument parser
ap = argparse.ArgumentParser()
ap.add_argument('-m', '--model', required=True,
help="path to trained serialized model")
ap.add_argument('-l', '--label-bin', required=True,
help="path to label binarizer")
ap.add_argument('-i', '--input', required=True,
help='path to our input video')
ap.add_argument('-o', '--output', required=True, type=str,
help='path to our output video')
args = vars(ap.parse_args())
--modelis the path to the saved model on the disk.--label-bingives the path to the saved binarized labels files. We have saved this file while executing theprepare_data.pyfile.--inputis the path to the input video clips that we will test our model on.--outputsis the path to save the output video clips after the video recognition takes place.
Load the Binarized Labels, Prepare the Model, and Define the Image Augmentations
We need to load the binarized labels to map the output tensors to the actual string labels (basketball or boxing or chess). We will also initialize the model here and load the saved weights to the model. Then we will define the image augmentations.
# load the trained model and label binarizer from disk
print('Loading model and label binarizer...')
lb = joblib.load(args['label_bin'])
model = cnn_models.CustomCNN().cuda()
print('Model Loaded...')
model.load_state_dict(torch.load(args['model']))
print('Loaded model state_dict...')
aug = albumentations.Compose([
albumentations.Resize(224, 224),
])
For the augmentation, we will only be resizing the images into 224×224 dimensions.
Capturing the Video using OpenCV
We can easily read and capture video frames using cv2.VideoCapture(). We will also need the frame width and height that we will use while saving the output frames.
cap = cv2.VideoCapture(args['input'])
if (cap.isOpened() == False):
print('Error while trying to read video. Plese check again...')
# get the frame width and height
frame_width = int(cap.get(3))
frame_height = int(cap.get(4))
# define codec and create VideoWriter object
out = cv2.VideoWriter(str(args['output']), cv2.VideoWriter_fourcc(*'mp4v'), 30, (frame_width,frame_height))
Also, we need to define the codec and specify the format for saving the video (line 11). We will save the video using MP4 format. All of the above functions are carried out by the following code block.
Reading the Frames and Carrying Out Predictions
We will read the video frame-by-frame until there are no more frames present. Then we will treat each frame as an image and carry out the predictions on each frame.
# read until end of video
while(cap.isOpened()):
# capture each frame of the video
ret, frame = cap.read()
if ret == True:
model.eval()
with torch.no_grad():
# conver to PIL RGB format before predictions
pil_image = Image.fromarray(cv2.cvtColor(frame, cv2.COLOR_BGR2RGB))
pil_image = aug(image=np.array(pil_image))['image']
pil_image = np.transpose(pil_image, (2, 0, 1)).astype(np.float32)
pil_image = torch.tensor(pil_image, dtype=torch.float).cuda()
pil_image = pil_image.unsqueeze(0)
outputs = model(pil_image)
_, preds = torch.max(outputs.data, 1)
cv2.putText(frame, lb.classes_[preds], (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 200, 0), 2)
cv2.imshow('image', frame)
out.write(frame)
# press `q` to exit
if cv2.waitKey(27) & 0xFF == ord('q'):
break
else:
break
# release VideoCapture()
cap.release()
# close all frames and video windows
cv2.destroyAllWindows()
- We are capturing the frame at line 4. If there is a frame present, we enter the
ifblock defined at line 5. - Here also, we use the evaluation mode and the prediction takes place inside the
with torch.no_grad()block (lines 6 and 7). - Line 9 first reads the frame using the OpenCV and converts it into RGB format. Then it converts the image into the PIL image format.
- From lines 10 to 13:
- We resize the image.
- Then we transpose the dimensions to make the image channels-first.
- At line 12, we convert the image into a torch tensor and transfer the image to GPU. Note that, if you have trained your model using CPU, then you need to use .cpu() instead of .cuda() at line 12.
- At line 13, we unsqueeze the image to add an extra batch dimension.
- At line 15, we predict the output and at line 16, we get the prediction index.
- Line 18, puts the prediction string on the frame using the index position in the binarized labels file.
- Line 19, shows the frame on the screen and line 20 saves the frame to disk.
- Finally, we break out of the
whileloop, release theVideoCapture()object, and destroy all video capture windows.
Run the test.py File
First, let’s test the neural network model on the chess clip.
python test.py --model ../outputs/sports.pth --label-bin ../outputs/lb.pkl --input ../input/example_clips/chess.mp4 --output ../outputs/chess.mp4
The model is predicting the output as chess except for a single frame. In that single frame, the model is predicting the output class as basketball instead of chess. This is most probably because the video does not match the images very well that we trained our deep learning model on. In the train images, there were people surrounding chess boards and whole board was visible at all times.
Let’s try out another video.
python test.py --model ../outputs/sports.pth --label-bin ../outputs/lb.pkl --input ../input/example_clips/boxing1.mp4 --output ../outputs/boxing1.mp4
The model is predicting the boxing video perfectly. This means that the model has learned well on the boxing image data.
Finally, we will test the model on the basketball video.
python test.py --model ../outputs/sports.pth --label-bin ../outputs/lb.pkl --input ../input/example_clips/basketball.mp4 --output ../outputs/basketball.mp4
Interestingly, the model predicts the basketball class correctly as well. So, the model has not overfit and learned all the features of the data very well.
Moving Ahead from Here
If you wish to learn more about video predictions using deep learning, then you can look at the following resources.
- Retrieving actions in movies, Ivan Laptev and Patrick Perez.
- Learning realistic human actions from movies, Laptev et al.
- Finding Actors and Actions in Movies.
- An End-to-end 3D Convolutional Neural Network for Action Detection and Segmentation in Videos, Chen Chen.
Maybe after reading some papers, you will be ready to expand the project even further using larger datasets and including many more actions. You can also try extracting frames from videos to train the neural network. If you do expand the project, then do let me know in the comment section of your results. I will surely address your comment.
Summary and Conclusion
In this article, you learned how to carry action recognition in videos using deep learning and PyTorch.
- First, you trained a model on different sports images.
- Then you used the trained model to predict actions in real-time videos.
If you have any thoughts, doubts, or suggestions, then you can leave them in the comment section and I will surely address them.
You can contact me using the Contact section. You can also find me on LinkedIn, and X.

Excellent stuff. Thank you so much for the tutorials. I implemented both Adrians as well as your code. My question what difference pytorch makes as compared to keras. Why should a researcher use PyTorch. Thank you.
I am glad that you liked it. Now coming to your question, it’s not like that practitioners only use Keras and researchers only use PyTorch. I have seen many research codes written in TensorFlow and Keras as well. The thing is you should always use a framework that is most intuitive to you. In my opinion, you should always master one framework and know a bit about others as well. By knowing some bits of other frameworks, you can always convert that code into the framework that you work with. If you see some of my previous posts (maybe six months back), I used TF and Keras. Then I tried PyTorch for some of my personal projects. I found it so intuitive and Python like that I never went back. And there are a whole lot of other benefits as well. Some people find the same experience with TF and Keras. So, master one and know about the others. I would like to hear your opinion on this too. Have a good day!
How do you annotate data for the action videos ??..i want to train my own custom data ..how to do that
Hello Rajesh. In this tutorial, each video was in its respective folder and the folders were named as per the actions. You can use the same strategy also.
Thank you for this great tutorial. I’m confused because the example is training a model on images and not videos. I am trying to train a model on video and I was planning to convert my videos into some kind of sequences of images and train the model on the sequences of images. That does not appear to be what is happening in this code. It seems that here, you are treating each image as a unique event, but I could be wrong about this. Can you please explain how the sequence component of the video is incorporated into training the model? Sorry if I am missing something obvious.
Hello Mikey. First of all, I am glad that you liked the tutorial.
Now, coming to clear up your confusion. If you see, we actually do not use any videos for training in this tutorial. We are using images of different sports categories. Almost all of the images that we train on are relevant to the actions that take place in that sport. That is the reason for the model working well enough even when testing on videos.
Correct me if I am wrong. But you are trying to train your model on videos. Right? In that case, you can treat each frame of your video as an image and train on that image. The only problem with that is that, if you directly read your video using OpenCV and train the model, then you will have difficulty bathching the data. You may have to train on a single frame at a time. What you can do is, you can extract the frames from the videos and save them on your disk as .jpg or .png images. Then you can try training your model again. I hope that this answers your question.
This is truly an excellent tutorial since it is very intuitive. My question is, when we choose our custom action and if we use key point detection per image and save the result in a csv file to train the model based on that key points, can we get more accurate result? Also can we use the method mentioned above to recognize suspicious action? Thank You.
Hello Ayaat. Hope that you found the article useful. Now coming to your first question. Actually, I have never tried recognizing actions from keypoint detection. I will have to research a bit on that. That will be a fun project to undertake though. I hope that I can post an article relating to that in the near future.
Coming to your second question. Yes, we can surely use the method in this article for suspicious action recognition. But if you are doing it as a large scale project, then please be mindful to collect a lot of correct data. As such systems are highly security-sensitive and need to be very accurate.
I hope this helps.
Thanks a lot.
Thank you for this tutorial.
I want to ask you a question. If I run the prepare.py file on 2 classes, so with 2 folders and 2 items in the array, the csv result about the target is 0.0 for both classes.
If I have 3 classes, the target is set to 0.0, 1.0, 2.0.
Maybe I am wrong?
Hello Alex. If you give two folder names in the array while preparing the dataset, then the targets should be 0.0 and 1.0.
I tried, but the target result is always 0 for both classes
Hi Alex. It was indeed producing 0 and 0 for two labels. It was because of how label binarizer (https://scikit-learn.org/stable/modules/generated/sklearn.preprocessing.LabelBinarizer.html) works for two labels. Now I have corrected it. Should work just fine. Please give a confirmation if it works for you.
It’s OK…thanks
could you add a classification report to this model it will useful please?
I will try my best to update the code. Might take some time as I will have to change and validate the code again.
Thank you for this great tutorial. I want to ask you a question. Can we use this project to detect goal moments in soccer game videos? I mean if we train this with goal images can it detect goal moments from video?
Hello cagdas. I am really happy that you liked it. And yes, if you can train on the right images, then you can surely detect goal moments. Good luck with your project. And please try to comment here if you complete the project. Others may also get inspired to do more such project.
Hello Sovit Ranjan,
I appreciate our effort. Nice tutorial. But, I have some confusion.
1. What is the difference between your code and adrian in “rolling average prediction” (as you said you were motivated from his work)?
2. Which lines of code in your work is eliminating the flickering effect?
I have some other questions, but let us discuss these first. Thank you in advance.
Hi Kanchon. Actually Adrian used rolling average prediction to avoid the flickering effect. But I am just using the simple predictions without the rolling average as my trained model already gave better results.
Can you help me understanding the “rolling average” part of adrian blog? I implemented this with “rolling highest” not “average” and found good result. But, I can’t understand the “rolling average” part of adrian blog and how he found the label based on the average value.
Sorry, I know it is unusual to discuss someone else blog in your own blogpost.
I understand your concern. But I am not sure whether the comment section is the right place to answer the questions as that would require it’s own dedicated space.
Hey it was a very nice tutorial.
I have some question how to take sequential data from a video file and train the model using pytorch?
Hello Alvi. For that, most probably, you will need to use LSTM. Currently, I do not have a tutorial on that. Most probably will write one in the near future.
Hi , thank you so much for this tutorial ,it was a very nice , but I have question , I have a video dataset, I want a model trained on a video and also used as a LSTM to find sequence the video data and the result is to know the type of action , How can I get this please ?
Hello Abeer. Thanks for the appreciation. Can you please further clarify? Are you trying to use an LSTM model instead of a CNN for action recognition?