This article explores the training process of PyTorch Mask RCNN model for real-time lane detection following an instance segmentation approach. ...
Lane Detection using Mask RCNN – An Instance Segmentation Approach


Machine Learning and Deep Learning
This article explores the training process of PyTorch Mask RCNN model for real-time lane detection following an instance segmentation approach. ...
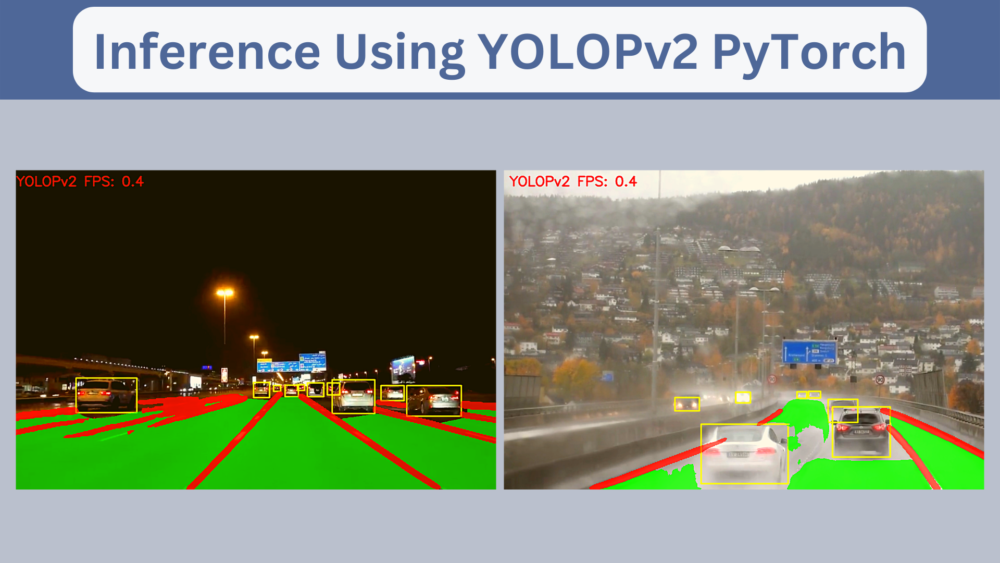
In this tutorial, we use the YOLOPv2 panoptic driving perception model for traffic object detection, drivable area segmentation, and lane detection. ...
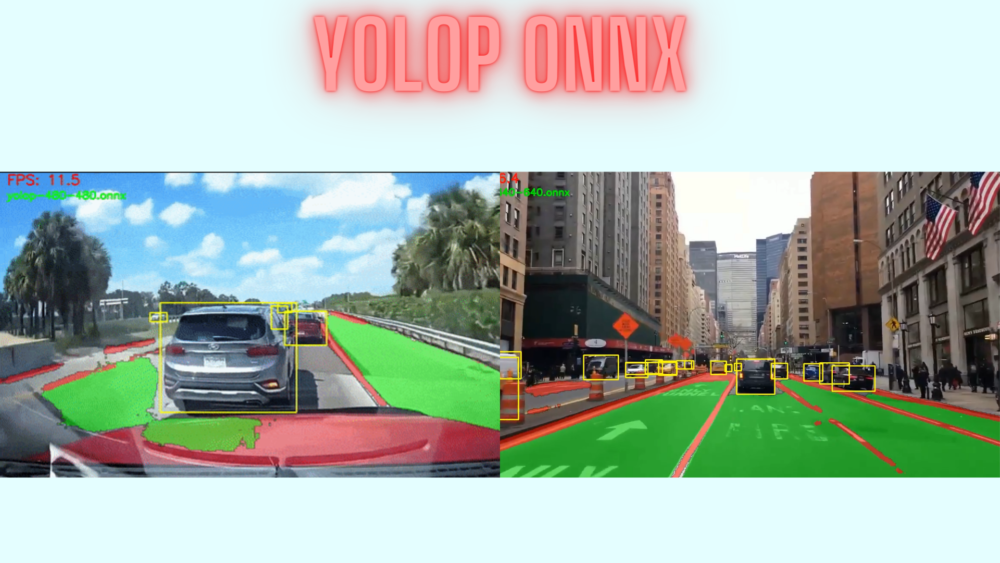
In this blog post, we test the YOLOP ONNX models at different resolutions for traffic object detection and drivable area segmentation. ...
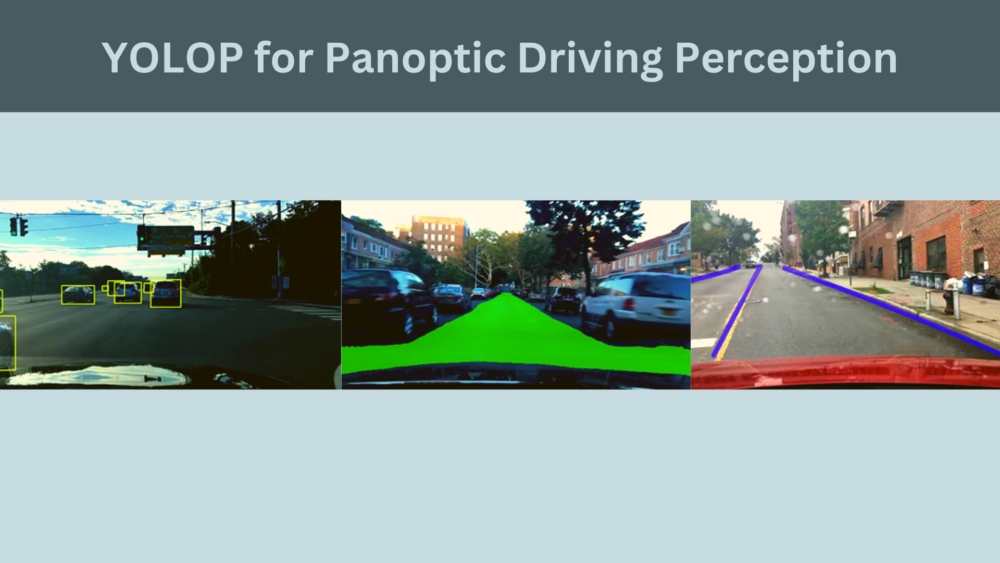
In this blog post, we explore the YOLOP model for Panoptic driving perception and autonomous driving. ...
Business WordPress Theme copyright 2025